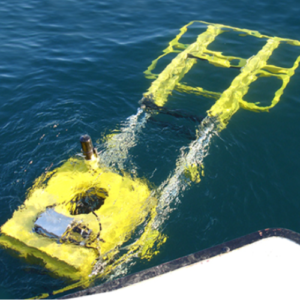
Advanced Metal Detector equipped with a linear array antenna
The success of the Linear Underwater Metal Detector resulted in the pursuit of research and development of an even more advanced metal detector equipped with a linear array antenna which would allow:
- Greater survey width, for each single run, to reduce the number of passages required to cover a given area, thus decreasing the survey time needed.
- Determination of the position of the objects found within the coil.
- Data on the size of the object.
- Data on how deep the object is buried
This second model was also designed for operations in depths up to 300 m. The antenna consists of five detection zones arranged in a single line array. The planar search antenna is two meters wide by one meter long and equipped with a mechanical support consisting of two arms with which it is attached to the ROV. The antenna consists of 12 independent transmission and receiving windings for the electromagnetic field in order to satisfy the detection needs and to provide sufficient data to determine position, dimension and depth of the target. The fundamental characteristics of the antenna system needed to achieve the best signal/noise ratio and to be able to operate with high dependability are rigidity, water tightness (@ 3 MPa pressure) and the precise electromagnetic balancing of the inductive system. During design and construction, particular care was also given to isolate the antenna from external interference sources, which could be electromagnetic (motors, lighting systems, electronics on the ROV) or mechanical (static or vibrating metallic structures in the vicinity). The final design of the Metal Detector Array was preceded by a series of measurements conducted on the surface with the purpose of verifying its electromagnetic environmental compatibility. In addition to the optimization of the inductive system, the distance of the planar array to the ROV and the type of materials used were selected in a way so they would not create any increase in the electronic background noise of the Metal Detector. The electronic control unit is housed in a AISI316 Stainless Steel enclosure similar to the one used in the first single zone device. The enclosure is equipped with a flange for attachment to the ROV. To prevent any infiltration of water, the enclosure is filled with resin.
Under water, the total weight of the antenna system including its support is compensated by the buoyancy of the materials selected and their density distribution as well as the number and location of sealed cavities inside the stainless steel support framework. The communication with the surface is achieved by a type RS-485 balanced asynchronous serial connection.